Rede CAN Automotiva

[clique na figura para informações sobre licença]
Você já parou para pensar de que forma conjuntos de diferentes marcas e origens com funções distintas, se integram em um sistema único atuando em momentos oportunos, tornando o ato de dirigir extremamente seguro e agradável?
Imagine, agora, se um desses componentes passasse a operar com problemas, comprometendo o sistema. Como descobrir qual componente deve ser reparado ou substituído?
A resposta para essas questões é uma só: através da CAN, Controller Area Network, a rede de dados veicular. Entenda, através desta série de artigos, como funciona e como podemos interagir com a mesma.
Surgimento da Rede Automotiva

Autoria: Grendelkhan-wikipedia.org
Os veículos estão mais seguros e fáceis de controlar graças a um número crescente de dispositivos que atuam de forma instantânea. O pedal da embreagem deixou de existir, a mudança de marchas é feita de forma automática, não temos que nos preocupar em controlar o freio ao sair com o veículo em ladeiras, equipamentos contra colisão nos avisam sobre veículos em pontos cegos ou quando nos aproximamos perigosamente de outros à nossa frente. Estacionar deixou de ser problema, e sabemos que em breve, seremos somente passageiros em veículos autônomos.
O Big-Bang
[clique na figura para informações sobre licença]
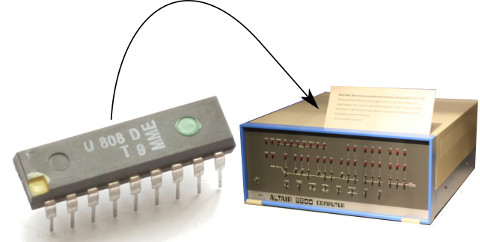
Para os que nasceram após os anos 90, todas essas inovações parecem ser consequências naturais do aprimoramento constante nos projetos, porém, um fato histórico se tornou o divisor de águas: o advento dos microprocessadores na década de 70, vindo a transformar os então chamados microcomputadores em realidade. Ocorre uma explosão! Uma inflexão exponencial na linha do tempo evolutiva!
Aparecem as redes, as máquinas evoluem
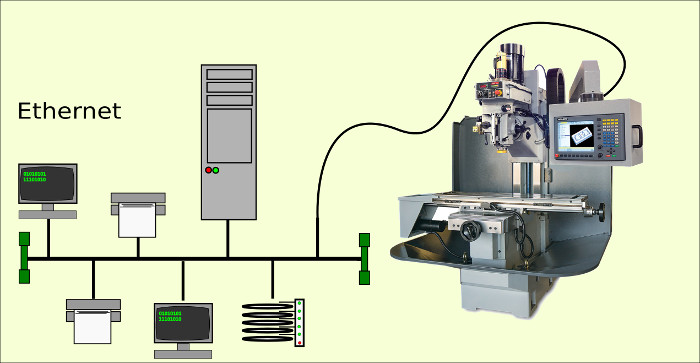
Do surgimento dos microcomputadores à criação de redes de dados, foi um passo bem curto, tornando os processos muito mais rápidos e confiáveis. O emprego de processadores dedicados; pequenos computadores com funções específicas; no controle de dispositivos mecânicos, permitiu que os maquinários passassem a ser comandados eletronicamente, dispensando a demorada construção de modelos tridimensionais necessários para construção de ferramental. O projeto saia da pequena tela do computador, e não mais da prancheta em escala 1:1, para a fabricação direta. O tempo de lançamento de um veículo se reduz de anos para meses, por uma fração do custo anterior.
[clique na figura para informações sobre licença]
A Informática alcança os veículos
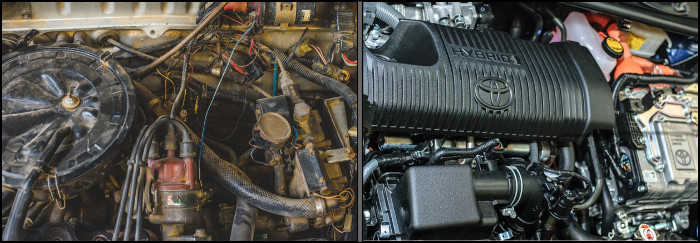
Em 1983, quando engenheiros da Bosch tiveram a ideia de utilizar uma rede de comunicação serial ligando todos os módulos eletrônicos através de um par de cabos trançados, como em uma rede de computadores, visualizaram de imediato, apenas a diminuição do peso por veículo e a enorme economia que seria feita em fios e cabos, além da simplicidade nas instalações de acessórios. Foi dessa forma que em 1992, a Mercedes Benz inaugurou uma nova era, equipando seus veículos de passeio com redes CAN, Controll Area Network.
Autoria: Sarmad Mughal
Autoria: Photomix
Proximos Artigos da Série:
-
Como funciona a rede CAN Automotiva
-
Protocolos das Redes CAN
-
Diagnosticos nas Redes CAN